用于pcdet的目标检测和demo预测。这是官网上面的全部模型,例如pointpillar、pointrcnn,由于文件太大无法上传,因为上传了百度网盘的地址。
”目标检测 OpenPCDet模型“ 的搜索结果
使用fastAPI对Opencv调用YOLO检测模型的过程进行封装,实现通过调用借口直接获取检测结果。
torch-1.9.0+cu111-cp38-cp38-linux_x86_64.whl和torchvision-0.10.0+cu111-cp38-cp38-linux_x86_64.whl右键复制下载链接,使用。最近在GPU服务器主RTX4090上部署了一下,折腾了一天发现就算4090安装cuda11.1按照...
【3D目标检测】OpenPCDet自定义数据集训练

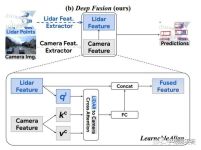
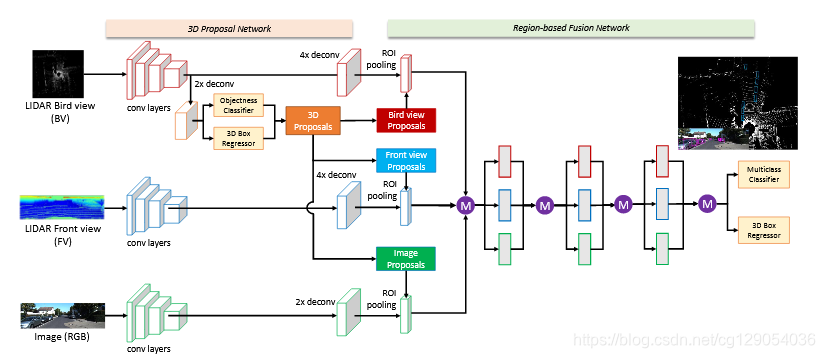
本文转载自知乎,已获作者授权转载。链接:https://zhuanlan.zhihu.com/p/152120636随着自动驾驶与机器人技术的不断发展,基于点云表征的3D目标检测领域在近...



PointPillars是一种用于三维物体检测的深度学习模型,其主要思想是将三维点云数据转化为二维的BEV(Bird’s Eye View)视角下的特征图,以实现在计算上的高效性和准确性。
OpenPCDet新手向教程,用小项目的形式记录自定义模块、网络、loss实现训练。
OpenPCDet权重文件pointpillar_7728.pth

OpenPCDet的3D目标检测的初步实践环节
参考:https://github.com/traveller59/kitti-object-eval-python,把相应的的依赖函数提取出来了,不需要单独安装second-1.5.1,spconv-1.0。也可以混合精度测试,通过修改config里的yaml参数,测试评估时要保证...




我的点云数据形式是(x,y,z,r)类型的,直接读取运用就行了,然后再进一步处理。 以下代码是my_datasets的从文件中读取和保存的代码 import numpy as np import copy import pickle import os import json ...
在Conda虚拟环境中搭建MMdetection3d环境
import io as sysio import numba import numpy as np from .rotate_iou import rotate_iou_gpu_eval @numba.jit def get_thresholds(scores: np.ndarray, num_gt, num_sample_pts=41): scores.sort() # 将得分...
Det3d—SE-SSD模型训练

推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地